一个机器人都应该有哪些部件?
一个机器人通常应该具备以下部件:
1. 机械结构:包括身体、关节、骨架等,用于支撑和移动机器人。
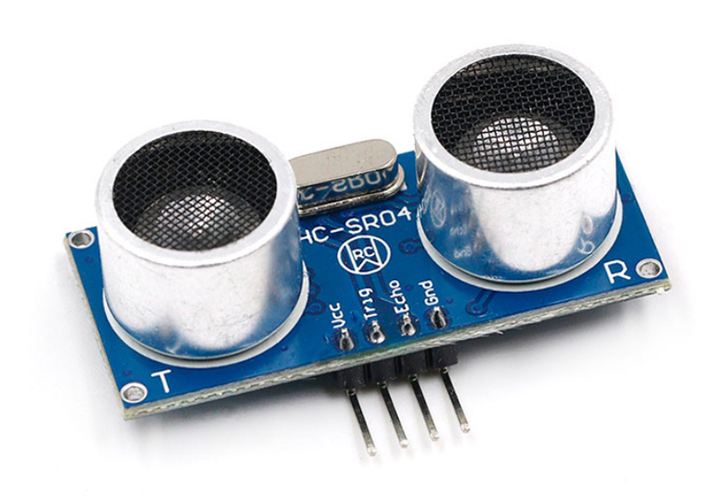
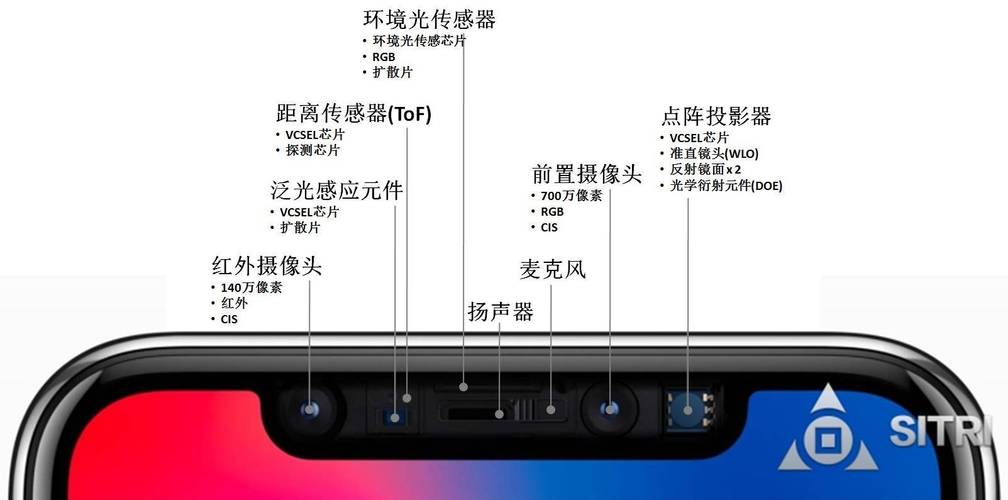
2. 传感器:用于感知环境,例如摄像头、激光雷达、触摸传感器、声音传感器等。
3. 处理器:用于处理数据和控制机器人的动作。
4. 电源:供应机器人的能源,例如电池、电缆等。
5. 执行器:执行机器人的动作,例如电动机、气动执行器等。
6. 控制系统:用于控制机器人的运动、任务执行等。
7. 语音识别和合成:实现机器人的语音交互能力。
8. 图像处理系统:用于处理和识别图像,用于机器人的视觉感知和分析。
9. 机器学习和智能算法:用于提升机器人的学习和决策能力。
10. 网络连接:用于与其他设备或云平台进行通信和交互。
11. 数据存储:用于存储机器人的数据和程序。
12. 外壳和外观设计:提供机器人的外部保护和美观性。
当然,不同类型的机器人可能会有不同的部件需求,具体的部件配置取决于其应用和功能。
-图1")
一个机器人应该有以下部件:
1. 主控制器(Central Processing Unit, CPU):类似于人的大脑,用于处理和控制机器人的各项活动和功能。
2. 传感器(Sensors):用于感知环境和获取信息,例如视觉传感器、听觉传感器、力量传感器、触觉传感器等。
3. 执行器(Actuators):用于执行动作和任务,例如电机、液压缸等。
4. 电源(Power source):提供能源供给机器人运作,例如电池、燃料电池等。
5. 通信设备(Communication devices):与人或其他机器人进行交流和数据传输的装置,例如无线网络、蓝牙等。
6. 壳体(Body shell):保护机器人内部组件,并提供机器人的外观。
7. 存储装置(Storage devices):用于存储数据和程序的设备,例如硬盘、固态硬盘、闪存等。
8. 程序(Software):控制和指引机器人运作的程序,包括操作系统、应用软件等。
9. 机械结构(Mechanical structure):机器人的框架和结构,用于支撑和运动。
10. 环境交互接口(Human-Interface Devices):用于与操作人员进行交互的设备,例如触摸屏、按钮等。
值得注意的是,机器人的部件和功能可以根据不同的任务和应用而有所差异。
科学家发明了哪些机器人?
1. SoBot服务机器人
2. 无人值守搜救机器人
3. 立体着陆机器人
4. Mars OGLE机器人
5. 医疗机器人
6. 工业机器人
7. 原型机器人
8. 人体助手机器人
9. 教育机器人
10. 无人机
科学家们在机器人技术领域进行了大量的研究和创新,已经研发出了许多不同种类的机器人。以下列举一些较为知名的机器人:
-图2")
1. ASIMO:由本田公司开发的人形机器人,能够行走、跑步,甚至上下楼梯。该机器人在人机交互、智能感应和运动控制方面是一个重要的突破。
2. Atlas:由美国公司波士顿动力开发的四肢机器人,通过使用激光传感器和摄像头来监测周围环境,能够在艰苦的地形上保持平衡并行走、爬行,同时还有强大的抓握能力。
3. Curiosity漫游车:由美国航天局开发的战略型机器人,被用作研究火星表面的专用设备。该机器人能够采集样品,并分析分析元素和化学性质,非常适合探索各类行星和环境。
-图3")
4. Roomba:由iRobot公司开发的地面扫地机器人,利用红外线传感器和摄像头感应到地面的脏污,自动清扫家庭、办公室地面的灰尘和污垢。
到此,以上就是小编对于生活中有哪些机器人的问题就介绍到这了,希望介绍的2点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏